My KG Memory Transfer paper was accepted at RLC 2026
Why I care about learning which symbolic facts should persist
Our paper, Short-Term-to-Long-Term Memory Transfer for Knowledge Graphs under Partial Observability, was accepted at RLC 2026. I wrote a structured overview on the project page, and the paper itself is on arXiv.
This project sits inside a research direction I care about a lot: explicit memory for reinforcement learning agents. In earlier work, I focused on how an agent can represent and use knowledge graphs as memory. In this paper, I narrow the question to something more specific and, I think, more fundamental: once an agent has both short-term observation memory and long-term symbolic memory, how should information move from one to the other?
That may sound like a small systems question, but under partial observability it is not small at all. An agent cannot keep everything forever. It has to decide which facts are worth preserving and which ones should be dropped. I wanted to study that transfer step directly instead of hiding it inside a recurrent latent state.
What the paper is about
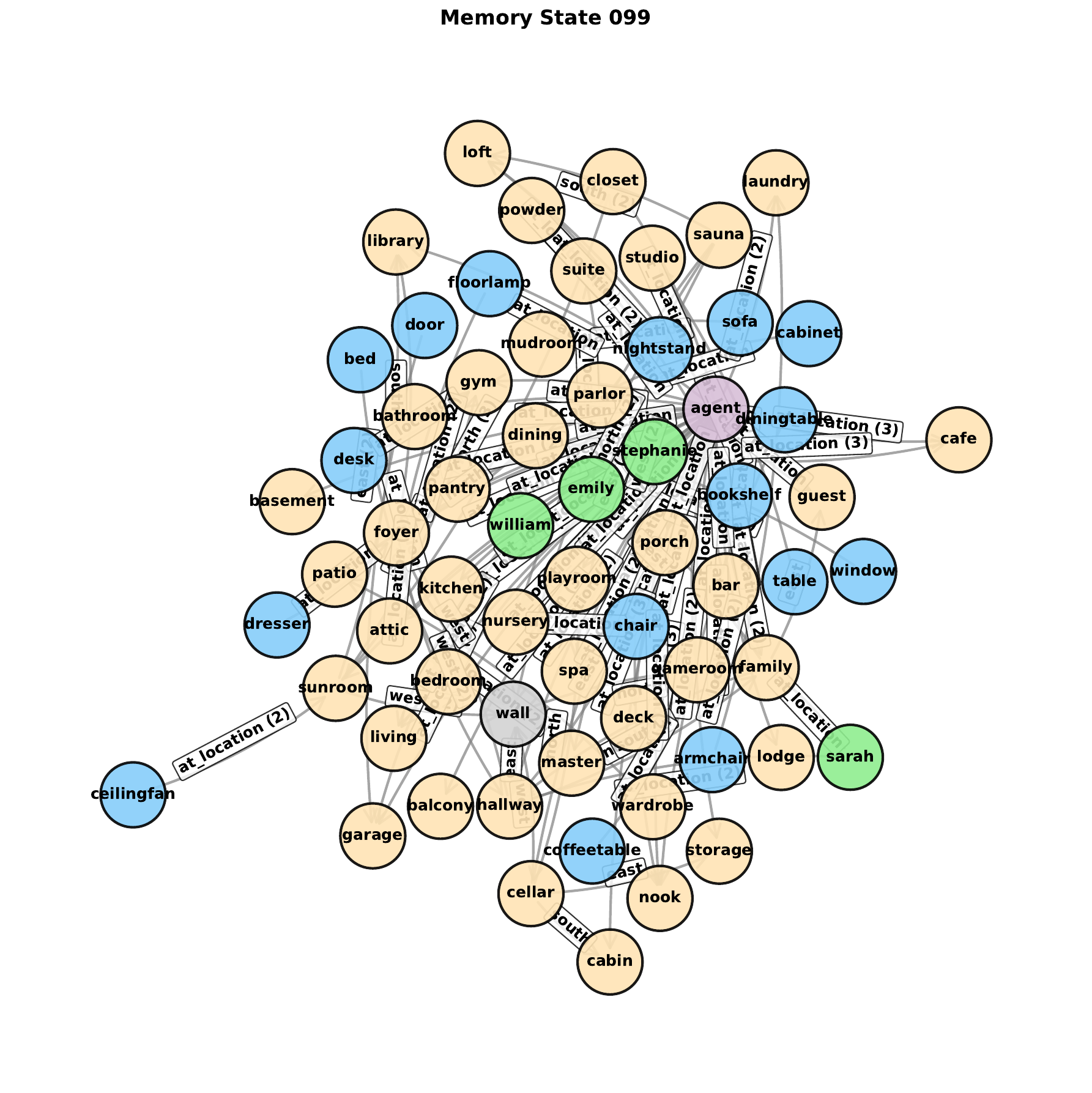
We use the RoomKG setting, where the agent receives local symbolic observations in the form of RDF triples. At each step, it sees only part of the world, stores those local facts in short-term memory, and operates under a limited long-term memory budget.
The core decision is simple: for each short-term fact, should the agent keep it and promote it into long-term memory, or drop it?
Formally, if the short-term memory contains items at step , then the transfer action space is
so the agent makes one binary keep/drop decision per short-term fact. I like this formulation because it makes the variable-cardinality part of the problem explicit. The number of transfer decisions changes over time as the short-term memory changes.
At a higher level, the internal symbolic memory evolves as
where is the current memory state, is the next local observation, and is the vector of keep/drop decisions. This viewpoint matters to me because it makes transfer a first-class part of the memory dynamics rather than a hidden implementation detail.
One technical wrinkle is that the short-term memories are a set of RDF triples with annotations, not an ordered sequence. That means there is no canonical way to align short-term items across consecutive steps for temporal-difference learning. In practice, we use randomized, order-agnostic matching. I think that is the right choice here because it is the simplest way to do matching without pretending the set has an order that it does not actually have.
The DQN part is also slightly unusual because the network does not output one action value for the entire memory state. Instead, it outputs one keep/drop value pair for each current short-term item:
So for each short-term fact , the agent gets two values: one for drop and one for keep. That is the part I find elegant. A single shared network can score a variable-size short-term set without pretending the action space has fixed size.
With the notation simplified a bit, the per-item TD target looks like
where is the index of a sampled matched pair under the randomized set-based matching procedure, not the identity of a persistent fact across time. If the current estimate is , then the loss is just the average squared TD error over the matched items,
with equal to the number of matched pairs available in that transition. I think this is a neat example of how standard DQN ideas can be adapted to a variable-cardinality symbolic memory problem without giving up interpretability.
Why I find the result interesting
What I like about this formulation is not only that it is interpretable, but that it works. In the controlled RoomKG setting at long-term memory capacity 128, the best configuration is a DQN temporal-RDF agent with a GCN encoder and a Local-STM transfer policy. It reaches 38.920 test QA accuracy. That is meaningfully higher than the strongest symbolic baseline, Novel-Only at 31.960, and far above the history-based neural baselines, where the Transformer reaches 11.800 and the LSTM 7.600.
Those numbers are encouraging, but what matters even more to me is why the policy works. Because the transfer decisions act on explicit triples, I can inspect what was kept and what was dropped. The learned policy tends to preserve self-location and question-relevant object-location facts while discarding many lower-value local map-link observations. That is exactly the kind of behavior I hoped explicit memory would make visible.
Why this fits the broader project
This paper feels like a natural continuation of the memory-systems line of work I have been building. First I asked whether explicit memory helps. Then I asked whether parts of memory management can be learned. Now I am asking whether short-term-to-long-term transfer itself can be isolated as the learning problem.
That progression is important to me. I do not think of memory as a single monolithic module. I think of it as a collection of concrete subproblems: storage, retrieval, forgetting, exploration, and transfer. If memory is explicit enough, each of those can be studied directly rather than absorbed into one opaque hidden state.
More broadly, this is how I think about neuro-symbolic reinforcement learning. I am not interested in symbolic structure only for philosophical reasons. I care about it when it gives better control, better interpretability, and a cleaner way to ask precise questions about agent behavior.
Links
- Project page: KG Memory Transfer
- Paper: arXiv
- GitHub: kg-memory-transfer